

ABSTRAK
Kinerja biosensor berbasis permukaan umumnya dibatasi oleh perpindahan massa, terutama saat mendeteksi spesies dengan konsentrasi rendah. Untuk mengatasi hal ini, dielektroforesis (DEP) dan elektroosmosis arus bolak-balik (ACEO) dapat dikombinasikan untuk meningkatkan perpindahan massa, meningkatkan konsentrasi target di dekat sensor. Artikel ini menyajikan metode untuk pencitraan langsung waktu nyata dari efek elektrohidrodinamik (EHD) pada suspensi mikropartikel dalam ruang mikrofluida yang dikelilingi oleh dua elektroda yang berlawanan. Konfigurasi atas-bawah ini kurang dipelajari dalam literatur untuk ACEO. Sistem yang disajikan dengan demikian memungkinkan pengukuran profil aliran fluida yang tegak lurus terhadap permukaan elektroda. Kecepatan pelacak mikrosfer lateks fluoresen diukur sebagai fungsi frekuensi sinyal, potensial, dan konduktivitas elektrolit. Pengaturan ini memungkinkan pengamatan langsung terhadap pusaran dan area yang kekurangan partikel, menawarkan alat yang berharga untuk memilih parameter input yang optimal—seperti medan listrik, konduktivitas, dan dimensi elektroda—untuk secara efisien memusatkan mikropartikel di dekat sensor. Selain itu, model numerik yang dikembangkan dalam COMSOL dan diadaptasi untuk konfigurasi atas-bawah ini meningkatkan pemahaman tentang parameter utama yang memengaruhi fenomena EHD.
1 Pendahuluan
Biosensor yang menggunakan metode deteksi berbasis permukaan digunakan untuk berbagai aplikasi dalam mendeteksi zat biologis. Biasanya, biosensor mengandalkan permukaan spesifik yang dimodifikasi dengan elemen pengenalan biologis untuk menangkap dan mendeteksi analit target. Biosensor dapat menggunakan berbagai teknologi untuk deteksi (resonansi plasmon permukaan [SPR], keseimbangan mikro kristal kuarsa, penginderaan elektrokimia, penginderaan impedimetri, dll.). Pada sensor berbasis permukaan, keterbatasan perpindahan massa dapat memengaruhi kinerja atau fungsionalitas sensor [ 1 ]. Misalnya, deteksi bakteri pasif pada konsentrasi rendah memerlukan waktu interaksi yang lama antara sampel dan permukaan sensor untuk memastikan penangkapan target yang memadai. Interaksi yang berkepanjangan ini tidak kompatibel dengan aplikasi pemantauan waktu nyata, dan batas deteksi sensor mungkin tidak tercapai dalam jangka waktu yang wajar.
Oleh karena itu, strategi untuk mengatasi keterbatasan tersebut diperlukan untuk memastikan pengukuran analit target yang tepat waktu. Misalnya, saluran mikrofluida dapat diintegrasikan ke dalam desain sensor untuk mengoptimalkan aliran sampel di atas permukaan sensor. Saluran ini membantu mengirimkan analit secara efisien ke daerah penginderaan, mengurangi jarak difusi dan sebagian mengatasi beberapa keterbatasan perpindahan massa [ 2 ]. Ketika dikenai medan magnet eksternal, fluida magnetik atau nanopartikel juga dapat digunakan untuk memanipulasi fluida atau mikropartikel, sehingga meningkatkan transportasi massa atau pencampuran [ 3 ]. Meskipun pendekatan berbasis magnetisme efektif dalam aplikasi tertentu, keterbatasan muncul tergantung pada sifat molekul target atau mikropartikel yang dimanipulasi, karena diperlukan langkah pelabelan yang mahal dan memakan waktu. Pendekatan elektrokinetik arus bolak-balik (AC) juga menawarkan alat yang berharga untuk meningkatkan perpindahan massa, manipulasi mikropartikel, dan kontrol fluida dalam sistem skala mikro [ 4 ]. Secara khusus, efek elektrotermal (ETE) dapat menyebabkan gradien termal dalam fluida, yang menyebabkan arus konveksi. Aliran konvektif ini membantu dalam mencampur dan mengangkut zat-zat dalam fluida, memfasilitasi perpindahan massa yang lebih cepat dengan mendorong pergerakan molekul atau mikropartikel ke permukaan sensor dan lokasi reaksi [ 5 ]. Namun, ETE tidak cocok untuk semua jenis sampel atau fluida, karena bahan biologis sering kali sensitif terhadap suhu tinggi. Elektroosmosis AC (ACEO) menginduksi aliran fluida dalam mikrokanal atau kapiler saat dikenai medan listrik bolak-balik. Fenomena elektrokinetik ini terjadi karena interaksi antara medan listrik dan lapisan ganda listrik (EDL) pada antarmuka padat-cair [ 6 ]. Ini meningkatkan perpindahan massa dengan menghasilkan aliran konvektif yang membantu dalam pencampuran dan pengangkutan molekul dengan cepat dalam perangkat mikrofluida. Dielektroforesis (DEP) melibatkan pergerakan mikropartikel dalam medan listrik yang tidak seragam. Mikropartikel mengalami gaya tergantung pada polarisasinya, yang menyebabkannya bergerak menuju daerah dengan kekuatan medan tinggi (DEP positif atau pDEP) atau kekuatan medan rendah (DEP negatif atau nDEP). Dengan demikian, DEP juga meningkatkan perpindahan massa dengan memungkinkan penangkapan selektif dan konsentrasi analit target [ 7 ]. Kombinasi efek ACEO dan DEP telah terbukti efisien dalam menangkap sel dan mikropartikel, atau molekul, dalam pendekatan penginderaan elektrokimia [ 8 , 9 ], SPR [ 10 – 12 ], atau berbasis impedansi [ 13 ].
Elektroda yang digunakan dalam percobaan DEP dan ACEO dapat berupa koplanar (yaitu, disusun pada substrat tunggal) atau tiga dimensi (3D) (yaitu, disusun dalam konfigurasi atas-bawah), tergantung pada persyaratan khusus percobaan. Meskipun elektroda paralel koplanar atau elektroda interdigitated digunakan secara luas untuk ACEO [ 14 – 18 ], hanya sedikit penelitian yang menyediakan gambar vortisitas yang dihasilkan dalam konfigurasi ini. Green et al. memperoleh gambar tersebut dengan objektif horizontal dan kamera, tetapi sedikit rincian diberikan pada pengaturan eksperimen dan tidak ada peta kecepatan eksperimen yang disediakan [ 14 ]. Visualisasi tampilan samping dalam perangkat mikrofluida dapat diperoleh dengan menggunakan pengaturan prisma [ 18 ], tetapi solusi ini dapat sulit diimplementasikan karena dinding mikrokanal harus benar-benar halus, dan refleksi internal yang disebabkan oleh transisi indeks bias udara/saluran/air dapat memengaruhi kualitas gambar. Pendekatan yang dipilih di sini terdiri dari memiringkan sistem elektroda sebesar 90°, yang memungkinkan penggunaan mikroskop terbalik standar yang dilengkapi dengan kamera.
Konfigurasi elektroda lain, seperti elektroda atas-bawah asimetris ada tetapi kurang terdokumentasi dengan baik. Mereka digunakan untuk manipulasi partikel [ 19 – 21 ] atau pencampuran mikro [ 22 ]. Namun, sejauh pengetahuan kami, tidak ada gambar penampang pusaran yang telah disediakan untuk konfigurasi elektroda tersebut. Selain itu, meskipun beberapa simulasi numerik telah diusulkan untuk desain elektroda 3D ini, mereka didasarkan pada penggunaan ekspresi analitis dari kecepatan elektroosmosis [ 19 ], yang diturunkan untuk pelat koplanar paralel [ 6 ]. Oleh karena itu, di sini kami mengusulkan untuk mengeksplorasi konfigurasi elektroda atas-bawah asimetris ini baik secara eksperimental maupun numerik, dengan tujuan mempelajari pengaruh parameter utama—seperti tegangan yang diberikan, frekuensi, konduktivitas medium, dan geometri—pada pembentukan dan dinamika pusaran. Konfigurasi ini mencakup jaringan mikrostruktur elektroda paralel di satu sisi ruang dan elektroda lawan di sisi yang berlawanan, yang memungkinkan pencampuran volumetrik dan pengangkutan partikel.
Artikel ini menyajikan hasil eksperimen dari garis arus yang dicitrakan dalam bidang yang tegak lurus terhadap permukaan elektroda, menjelaskan secara rinci metodologi untuk menangkap dan menganalisis citra ini. Pendekatan pencitraan yang disajikan di sini bersifat serbaguna dan dapat diterapkan pada konfigurasi elektroda lain untuk studi elektrohidrodinamik (EHD). Untuk melengkapi karya eksperimen, disajikan model numerik yang dikembangkan dalam COMSOL, yang memprediksi gerakan fluida dan partikel dalam berbagai kondisi dan geometri untuk konfigurasi elektroda atas-bawah. Model ini memberikan wawasan berharga tentang interaksi antara efek ACEO dan DEP, yang menawarkan alat yang ampuh untuk merancang dan mengoptimalkan biosensor.
Pada akhirnya, tujuannya adalah untuk memanfaatkan kerangka eksperimental dan numerik yang terperinci ini guna mengembangkan biosensor hibrida yang menggabungkan efek ACEO–DEP dengan pencitraan SPR yang disempurnakan untuk deteksi bakteri dalam air secara real-time. Lebih jauh lagi, metodologi ini dapat diadaptasi ke biosensor berbasis permukaan lainnya, asalkan permukaan penginderaan tersebut dimikrostruktur untuk berfungsi sebagai elektroda untuk pembangkitan medan listrik.
2 Fenomena Fisik
2.1 DEP
DEP merupakan fenomena yang terjadi saat partikel terpolarisasi dikenakan medan listrik tak seragam, sehingga menimbulkan gaya dielektroforesis yang bekerja pada partikel tersebut.
Hal ini diungkapkan sebagai berikut:

dengan
permitivitas partikel dan
satuan imajiner.
Untuk menentukan arah gaya, kita harus mempertimbangkan sifat dielektrik (konduktivitas dan permitivitas) dari partikel dan fluida, serta frekuensi medan listrik, yang bersama-sama menentukan tanda bagian riil dari
Jika partikel lebih terpolarisasi daripada cairan (
), partikel tersebut mengalami gaya positif yang menariknya ke area tempat garis medan paling terkonsentrasi. Sebaliknya, jika partikel tersebut kurang terpolarisasi, partikel tersebut mengalami gaya negatif yang menolaknya dari area tersebut.
2.2 ACEO
Fenomena ACEO adalah mekanisme fisik yang menginduksi gerakan muatan dalam media berair. Ketika elektroda direndam dalam media berair dan tegangan diberikan di antara keduanya, ion-ion dalam larutan bergerak menuju elektroda dengan muatan yang berlawanan. Ketika tegangan bolak-balik diberikan, ion-ion mengubah arah sebagai respons terhadap polarisasi elektroda. Lapisan ion pada permukaan elektroda dikenal sebagai EDL. Model yang digunakan untuk menggambarkan lapisan ganda ini adalah model Gouy–Chapman–Stern, yang mencakup lapisan muatan padat yang teradsorpsi pada permukaan, yang disebut lapisan Stern, dan lapisan difus dengan muatan bergerak [ 23 ].
Bila muatan terakumulasi pada antarmuka elektroda/elektrolit, sistem berperilaku seperti kapasitor dengan kerapatan muatan yang tidak seragam. Potensial menurun secara eksponensial di seluruh lapisan ganda dengan panjang karakteristik yang dikenal sebagai panjang Debye, yang sesuai dengan ketebalan lapisan ganda dan dinyatakan sebagai berikut:
dengan R adalah konstanta gas, T adalah suhu absolut dalam Kelvin, F adalah konstanta Faraday, dan z i dan c i , masing-masing, adalah valensi dan konsentrasi ion.
Komponen medan listrik tangensial diperlukan untuk menggerakkan muatan lapisan difusi, berkat gaya Coulomb. Muatan ini bergerak sepanjang bidang geser pada kecepatan elektroosmotik geser.
diberikan oleh rumus Helmholtz–Smoluchowski (lihat persamaan berikut), membawa cairan bersama mereka melalui hambatan viskos [ 24 ]:
Di mana
mengacu pada viskositas,
menunjukkan komponen tangensial dari
lapangan, dan
adalah potensial listrik pada batas antara permukaan elektroda dan cairan di sekitarnya, diukur pada bidang slip, terletak tepat di luar lapisan Stern di EDL [ 25 , 26 ] dan disebut sebagai potensial zeta.
Kecepatan slip ini menyebabkan resirkulasi—atau pusaran—di dalam cairan melalui entrainmen viskos. Beberapa parameter, seperti konduktivitas medium, tegangan yang diberikan, dan frekuensi potensial bolak-balik, memengaruhi pembentukan pusaran. Ketergantungan frekuensi kecepatan dikaitkan dengan perilaku impedansi lapisan ganda yang bergantung pada frekuensi. Pada frekuensi yang sangat rendah, tersedia waktu yang cukup bagi lapisan ganda untuk terbentuk selama setiap setengah siklus potensial yang diberikan, sehingga menghasilkan impedansi lapisan ganda yang lebih tinggi. Medan listrik tangensial di lapisan ganda kecil karena penurunan tegangan terkait, yang menghasilkan kecepatan slip yang kecil. Sebaliknya, pada frekuensi tinggi, lapisan ganda tidak memiliki cukup waktu untuk terbentuk sepenuhnya, yang menyebabkan impedansi lapisan ganda rendah. Dalam kasus ini, karena muatan di lapisan ganda berkurang, potensi zeta menjadi lebih kecil, sehingga sekali lagi menghasilkan kecepatan slip yang kecil. Pada frekuensi menengah, produk medan listrik tangensial dan potensi zeta di antarmuka dimaksimalkan, menghasilkan kecepatan slip tertinggi [ 6 , 20 , 27 ]. Konduktivitas medium juga memengaruhi perilaku ACEO melalui dampaknya pada lapisan ganda. Secara khusus, konduktivitas menentukan seberapa cepat ion merespons medan listrik dan terakumulasi di dekat elektroda dan mengisi EDL. Untuk media dengan konduktivitas yang sangat rendah, ada sedikit ion dalam jumlah besar, yang mengharuskan mereka bermigrasi dalam jarak yang jauh untuk menyeimbangkan muatan elektroda. Akibatnya, lapisan ganda membutuhkan waktu lebih lama untuk terbentuk. Ketika EDL tidak sepenuhnya terbentuk, fluks elektroosmotik berkurang. Sebaliknya, konsentrasi ion yang lebih tinggi dalam cairan menyebabkan lapisan ganda yang lebih padat, terbentuk dengan cepat, dan efek penyaringan yang ditingkatkan, yang mengurangi potensi zeta dan menurunkan kecepatan elektroosmotik. Frekuensi optimal untuk aliran ACEO juga bergantung pada laju osilasi medan AC relatif terhadap waktu pengisian lapisan ganda. Pada media dengan konduktivitas rendah, waktu pengisian lebih lama, sehingga memerlukan frekuensi AC yang lebih rendah untuk kinerja ACEO yang optimal. Media dengan konduktivitas tinggi memungkinkan pembentukan EDL yang cepat dan memerlukan frekuensi yang lebih tinggi untuk mencegah fenomena parasit seperti elektrolisis atau difusi [ 27 ].
3 Bahan dan Metode
3.1 Pembuatan Elektroda
Elektroda yang digunakan untuk menghasilkan pusaran melalui ACEO terdiri dari elektroda emas polos dan elektroda emas berstruktur mikro yang dibuat menggunakan teknik fotolitografi dan etsa basah. Elektroda ini disusun dalam konfigurasi atas-bawah di bagian depan dan belakang ruang mikrofluida, dipisahkan oleh jarak 160 µm. Ruang tersebut ditutup oleh perekat dua sisi di bagian atas dan tepi, dengan kaca mikroskop yang membentuk bagian bawah.
Elektroda berstruktur mikro berbentuk sisir dengan lebar jari 100 µm dan celah 200 µm. Kaca slide berukuran 40 × 25 × 1,1 mm3 pertama -tama dilapisi dengan lapisan kromium 50 nm diikuti oleh lapisan emas 150 nm (Neyco). Kaca slide kemudian dilapisi dengan photoresist AZ 5214 E (Microchemicals) pada 3500 rpm selama 30 detik dan dipanggang pada suhu 110°C selama 1 menit dan 30 detik.
Selanjutnya, sampel disinari dengan sinar UV pada 365 nm menggunakan sistem paparan berbasis LED UV (KLOE, UV-KUB) melalui masker foto asetat. Fotoresist yang diaktifkan UV dikembangkan menggunakan pengembang AZ 726MIF (Merck), mengikuti protokol pemasok. Bagian lapisan logam yang tidak terlindungi dietsa menggunakan etsa emas dan kromium (Merck) untuk menghasilkan pola sisir yang diinginkan. Terakhir, fotoresist yang tersisa dihilangkan dengan aseton.
3.2 Pembuatan Perangkat
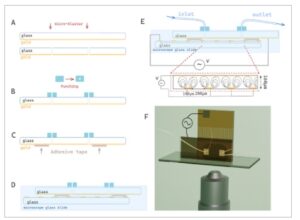
Kedua elektroda yang dijelaskan sebelumnya diperlukan untuk merakit sistem elektroda 3D. Pertama, elektroda polos emas dilubangi menggunakan microblaster (COMCO, Burbank, California) untuk membuat dua lubang (Gambar 1A ). Selanjutnya, dua potong polidimetilsiloksan (PDMS) yang dilubangi (dilubangi dengan alat berukuran 1 mm) dan sisi kaca dari elektroda polos emas diperlakukan dengan pembersih plasma udara selama 1 menit (Pembersih Plasma Harrick). Perlakuan ini memastikan ikatan permanen PDMS ke kaca, membentuk saluran masuk dan keluar ruang mikrofluida (Gambar 1B ).
GAMBAR 1
Buka di penampil gambar
Kekuatan Gambar
(A–E) Pembuatan perangkat langkah demi langkah (tampilan bawah); (E) Perbesaran pada ruang mikrofluida saat tegangan diberikan; (F) Pembuatan 3D perangkat akhir (tampilan depan).
Ruang mikrofluida, yang disorot oleh garis putus-putus merah pada Gambar 1E , dibangun menggunakan dua lapisan stiker perekat dua sisi (ISpacer dari SUNJin Lab, Hsinchu, Taiwan), masing-masing dengan ketebalan 80 µm, sebagaimana diukur oleh Dektak surface Profiler (Veeco). Desain ruang dipotong dari stiker menggunakan mesin pemotong presisi (CAMEO, Silhouette), sebagaimana diilustrasikan pada Gambar S1 . Dua lapisan ISpacer kemudian ditempatkan dengan hati-hati pada permukaan emas elektroda polos (Gambar 1C ).
Untuk melengkapi perakitan, dua elektroda, yang diikat dengan perekat ISpacer seperti yang ditunjukkan pada Gambar 1D , disusun secara vertikal dan diamankan ke slide kaca mikroskop menggunakan lem UV (LOCTITE AA 3491, dibeli dari Farnell). Magnet atau kotak dapat digunakan untuk memastikan bahwa elektroda tegak lurus dengan slide kaca. Perekat cair UV, untuk penyegelan, diaplikasikan di sepanjang kontak antara elektroda dan slide kaca, dan pengeringan dimulai sesuai permintaan dengan sumber cahaya UV (SV43, Alonefire, Inggris). Segera setelah perekat diaplikasikan, perekat tersebut terkena cahaya UV selama minimal 30 detik (tergantung pada ketebalan perekat) untuk memastikannya mengering sebelum menyebar ke dalam bilik. Proses yang sama diulang untuk kontak elektroda-ke-slide kaca kedua, dan lapisan lem tambahan diaplikasikan di sekitar elektroda untuk memastikan penyegelan yang tepat.
Akhirnya, pipa saluran masuk dan keluar dihubungkan ke ruang mikrofluida, dan kedua elektroda dihubungkan ke generator tegangan (Agilent 33250A) menggunakan klip buaya (Gambar 1E,F ). Untuk mencegah kontaminasi dari debu, elektroda dan slide kaca dibersihkan sebelum perakitan dengan aseton, etanol, dan air deionisasi (DI) dan kemudian dikeringkan dengan N2. Selanjutnya, semua larutan yang dimasukkan ke dalam perangkat disaring melalui filter jarum suntik 0,22 µm sebelum menambahkan mikropartikel fluoresen 1 µm.
3.3 Pengaturan Eksperimen
Aliran sirkulasi divisualisasikan menggunakan manik-manik mikro fluoresen 1 µm (Fluoresbrite Multifluorescent Microspheres, Polysciences, Bergstrasse, Jerman). Manik-manik tersebut disuspensikan dalam buffer yang bersirkulasi dalam sistem, yang dikontrol oleh pengontrol aliran mikrofluida (OB1, ELVEFLOW, Paris, Prancis), seperti yang ditunjukkan pada Gambar S2 . Pengamatan dilakukan menggunakan mikroskop epifluoresen terbalik Carl Zeiss Axiovert yang dilengkapi dengan set filter Cy3 dan lensa objektif 10× EC Plan Neofluar (Carl ZEISS). Film yang menangkap perilaku mikropartikel di bawah gaya ACEO/DEP direkam menggunakan kamera kecepatan tinggi seri Photron Fastcam (Photron, Wycombe, Inggris) dan dianalisis dengan perangkat lunak Photron Fastcam Viewer (PFV3).
Potensial AC berkisar antara 4 hingga 8 V pp pada 1 kHz diterapkan untuk menghasilkan gaya elektrokinetik. Untuk mencegah efek pembebanan, penguat dengan impedansi keluaran mendekati nol (HSA4011, NF) ditempatkan di antara generator dan perangkat.
3.4 Persiapan Sampel
Sampel disiapkan menggunakan air DI, manik-manik mikro fluoresen 1 µm, dan kalium klorida (KCl) pada berbagai konsentrasi untuk mencapai konduktivitas yang berkisar dari σ = 0,5 mS/m hingga 30 mS/m. Konduktivitas diukur menggunakan konduktometer Mettler Toledo yang dilengkapi dengan probe konduktivitas InLab 741 (Mettler Toledo, Viroflay, Prancis).
Mikrobead awalnya dibilas dengan air DI dan kemudian disuspensikan kembali dalam larutan KCl pada konduktivitas yang diinginkan. Konsentrasi akhir mikrobead disesuaikan menjadi 4,55 × 107 partikel /mL (ditentukan secara eksperimental untuk memastikan jumlah pelacak yang cukup untuk pengukuran kecepatan yang andal).
3.5 Pengukuran dan Pengolahan Gambar
Untuk setiap konduktivitas penyangga, tiga pengukuran dilakukan pada tiga voltase berbeda (4, 6, dan 8 V pp ), dengan frekuensi 1 kHz. Setiap pengukuran terdiri dari video berdurasi 10 detik yang diikuti oleh pengambilan gambar 30 detik setelah perekaman. Film yang direkam selanjutnya diproses menggunakan ImageJ.
Di antara perubahan konduktivitas, perangkat dibilas terlebih dahulu dengan etanol yang disaring dan kemudian dengan air DI yang disaring. Untuk melepaskan manik-manik dari elektroda dan mengembalikan distribusi partikel yang seragam di dalam ruang, aliran bolak-balik diterapkan, memastikan kondisi yang konsisten (konduktivitas dan frekuensi) di antara pengukuran sambil memvariasikan tegangan.
Untuk menghindari terbentuknya gelembung udara yang dapat mengganggu aliran, perhatian khusus diberikan pada desain ruang, laju aliran, dan pilihan cairan. Ruang tersebut dibangun tanpa sudut, dan laju aliran dijaga tetap rendah saat menggunakan air. Etanol dipilih karena tegangan permukaannya yang rendah, yang memungkinkan pembasahan ruang secara efisien sebelum disiram dengan air, yang membantu menghilangkan gelembung udara.
Protokol pembersihan ditetapkan untuk membuang partikel mikro fluoresen yang telah teradsorpsi ke elektroda setelah serangkaian pengamatan dan membuat perangkat dapat digunakan kembali. Larutan Hellmanex III (Merck) 2% dalam air DI disuntikkan ke dalam perangkat, yang kemudian ditempatkan dalam bak ultrasonik selama 30 menit pada suhu 40°C. Larutan pembersih selanjutnya dibuang dengan membilas perangkat dengan air DI, sehingga perangkat dapat digunakan kembali.
Tumpukan gambar percobaan diproses menggunakan ImageJ, dan kecepatannya dihitung dengan menerapkan perintah pelacakan dari Plugin TrackMate dalam area yang diminati [ 28 ]. Pusaran divisualisasikan dengan melapiskan semua gambar menjadi satu gambar.
3.6 Simulasi COMSOL
Simulasi numerik dilakukan untuk memodelkan efek DEP dan ACEO menggunakan perangkat lunak COMSOL Multiphysics. Tujuannya adalah untuk mensimulasikan perilaku partikel dalam ruang mikrofluida dalam berbagai kondisi, termasuk perubahan geometri ruang.
Studi berikut mengabaikan terjadinya reaksi faradaik (seperti elektrolisis) dan dengan demikian mengasumsikan elektroda yang terpolarisasi secara ideal. Selain itu, untuk kesederhanaan, kami mengasumsikan bahwa tegangan lapisan ganda berada pada urutan tegangan termal, yang memungkinkan kita untuk memperlakukan sistem persamaan sebagai linier [ 29 ].
Model geometri 2-D yang ditunjukkan pada Gambar S3 terdiri dari persegi panjang, yang tingginya sesuai dengan tinggi ruang fluida. Elektroda emas bagian bawah diwakili oleh segmen terpolarisasi sepanjang 100 µm, sedangkan elektroda bagian atas dimodelkan sebagai segmen tak terpolarisasi.
Perlu dicatat, banyak penelitian bergantung pada penggunaan ekspresi analitis kecepatan elektroosmosis untuk perhitungan [ 19 , 30 ]. Namun, hal ini tidak berlaku untuk semua geometri perangkat. Oleh karena itu, kami menggunakan pendekatan numerik yang diusulkan oleh Green et al. sebagai gantinya [ 14 ].
Potensial melintasi ruangan dihitung dengan memecahkan persamaan Laplace.
menggunakan persamaan berikut sebagai kondisi batas tipe Robin pada elektroda dalam modul persamaan COMSOL Laplace:
Di mana
adalah potensi pada lokasi mana pun,
adalah potensi yang diterapkan pada elektroda,
adalah kapasitansi lapisan ganda per satuan luas, dan
adalah konduktivitas elektrolit.
Metode ini memberikan potensi pada tepi luar lapisan ganda, dari mana kecepatan elektro-osmotik slip dapat diturunkan menggunakan Persamaan ( 6 ).
Kecepatan slip rata-rata waktu kemudian dapat dinyatakan sebagai berikut [ 14 , 17 ]:
di mana Λ adalah rasio antara kapasitansi lapisan ganda dan lapisan difus saja, dinyatakan sebagai Λ. Kecepatan ini kemudian diberlakukan sebagai kondisi batas pada permukaan elektroda untuk memperkirakan gerakan fluida dengan memecahkan persamaan Navier–Stokes menggunakan modul aliran Laminar COMSOL, dengan asumsi bahwa fluida tersebut tidak dapat dikompresi. Dalam modul ini, kondisi dinding berikut ditetapkan: Kondisi antiselip diterapkan pada dinding atas dan bawah, kecuali pada elektroda, di mana kecepatan selip didefinisikan oleh Persamaan ( 6 ), seperti yang diilustrasikan pada Gambar S3 .
Kondisi batas simetri kemudian diterapkan pada dinding kanan dan kiri ruang mikrofluida dalam modul aliran laminar. Batasan titik tekanan nol juga ditambahkan pada keempat sudut ruang mikrofluida.
Metode ini, yang melibatkan penyelesaian persamaan Laplace pada elektroda terlebih dahulu dan kemudian menyimpulkan kecepatan selip, memiliki keuntungan karena dapat diadaptasi ke geometri apa pun.
Untuk melacak lintasan partikel dan menghitung partikel yang tertangkap di elektroda, kami menggunakan modul “Particle Tracing for Fluid Flow”. Dalam modul ini, perilaku partikel saat bertemu batas perlu didefinisikan. Kondisi batas “lengket” telah diterapkan untuk memastikan bahwa setelah partikel menyentuh permukaan, partikel tersebut tetap menempel. Memang, karena kami tertarik untuk menghitung partikel yang bersentuhan dengan permukaan elektroda, kondisi ini memungkinkan partikel untuk tetap berada di atasnya. Selain itu, pilihan ini selaras dengan perilaku yang diharapkan dari spesies target, yang seharusnya mengikat permukaan sensor yang difungsikan secara kimia. Partikel-partikel tersebut mengalami hambatan (berdasarkan kecepatan yang diperoleh dari modul aliran laminar) dan gaya DEP, yang keduanya diterapkan dalam COMSOL. Pelacakan partikel ini memungkinkan penyelidikan tentang bagaimana geometri ruang memengaruhi penangkapan mikropartikel. Sifat-sifat mikropartikel (manik-manik lateks) disediakan dalam Tabel S1 .
4 Hasil dan Pembahasan
4.1 Kekuatan yang Terlibat
Sistem pengamatan khusus, dikombinasikan dengan simulasi COMSOL, menyediakan alat yang berharga untuk menyelidiki efek EHD pada partikel dan memahami interaksi antara DEP dan profil kecepatan aliran yang diinduksi ACEO.
Ketika partikel 1 µm yang digunakan dalam penelitian kami dikenakan medan listrik AC dengan frekuensi 1 kHz, gaya dielektroforesis secara teoritis ditemukan positif untuk konduktivitas medium yang lebih rendah dari 4 mS/m (lihat bagian Informasi Pendukung). Fenomena ACEO, meskipun bukan gaya itu sendiri, menginduksi pusaran yang mencampur cairan di seluruh ruangan. Gerakan ini, yang didorong oleh gaya hambat (lihat bagian Informasi Pendukung), berkontribusi pada gerakan partikel.
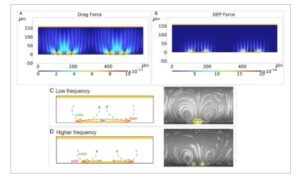
Meskipun gaya DEP menarik partikel ke daerah medan listrik yang kuat—khususnya, tepi ruang, seperti yang ditunjukkan pada Gambar 2B —gaya hambat mendorong partikel dalam lintasan melingkar, seperti yang diilustrasikan pada Gambar 2A . Dalam kondisi yang dijelaskan, efek ACEO mendominasi DEP [ 19 , 30 ].
GAMBAR 2
Buka di penampil gambar
Kekuatan Gambar
(A) Gaya hambat dan (B) Gaya DEP: Peta gaya diplot pada COMSOL dengan anak panah yang menunjukkan arah dan besarnya vektor gaya. Parameter ditetapkan pada frekuensi 1 kHz, konduktivitas 1 mS/m, dan tegangan 6 V pp . Efek ACEO dan DEP pada penangkapan partikel di bawah rezim elektrokinetik yang berbeda dengan gambar pusaran di mana area penangkapan partikel dilingkari dengan warna kuning pada (C) frekuensi rendah (biasanya 1 kHz pada gambar di sebelah kanan) dan (D) frekuensi lebih tinggi (biasanya 2 kHz pada gambar di sebelah kanan). DEP, dielektroforesis.
Saat partikel mendekati tepi elektroda, mereka dipercepat oleh gaya pDEP, yang memodifikasi lintasan partikel yang diinduksi ACEO. Interaksi ini menyebabkan partikel bergerak menuju daerah stabil di dekat pusat elektroda, tergantung pada keseimbangan gaya. Pada posisi stabil ini, gaya hambat viskos dan gaya DEP saling berlawanan, seperti yang digambarkan pada Gambar 2C,D . Lokasi yang tepat dari posisi stabil ini dipengaruhi oleh kondisi eksperimental, termasuk frekuensi, konduktivitas medium, dan tegangan yang diberikan, yang semuanya menentukan keseimbangan antara gaya hambat dan gaya DEP [ 11 , 31 ].
4.2 Pengamatan Pusaran
Pengamatan eksperimental dan numerik terhadap pusaran dilakukan menggunakan perangkat yang dijelaskan dalam Bagian 3.2 dan simulasi COMSOL yang diuraikan dalam Bagian 3.6.
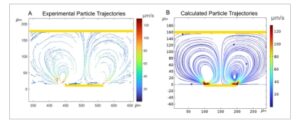
Kecepatan eksperimen diekstraksi menggunakan perintah pelacakan di ImageJ (Plugin TrackMate) dalam area yang diminati [ 28 ]. Data yang dihasilkan kemudian diproses dalam MATLAB untuk menghasilkan peta kecepatan, seperti yang ditunjukkan pada Gambar 3A . Peta kecepatan numerik yang sesuai, yang diperoleh dari simulasi COMSOL, direpresentasikan dalam Gambar 3B . Karena simulasi numerik biasanya melebih-lebihkan kecepatan fluida dibandingkan dengan hasil eksperimen karena dinamika nonlinier sebagai respons terhadap tegangan besar, faktor koreksi—
—diperkenalkan oleh Green et al. [ 14 , 16 ] dan dibahas oleh Bazant et al. [ 29 , 32 ] diaplikasikan pada kecepatan selip Helmholtz–Smoluchowski (Persamaan 6 ) dalam simulasi numerik sebagai parameter yang sesuai. Hal ini ditentukan dengan membandingkan hasil eksperimen dan numerik, khususnya dalam pembentukan zona penipisan dan kecepatan mikropartikel, sehingga hasil numerik sesuai dengan eksperimen. Faktor koreksi antara 0,016 dan 0,025 memungkinkan hasil numerik untuk selaras dengan data eksperimen. Hal ini ditetapkan ke 0,02 dalam simulasi COMSOL untuk memperoleh peta kecepatan pada Gambar 3B , dalam video Informasi Pendukung , dan studi tentang pengaruh geometri ruang yang ditunjukkan pada Gambar 5 . Nilai faktor koreksi yang rendah disebabkan oleh penerapan tegangan yang relatif tinggi pada lapisan ganda dalam larutan encer (beberapa volt ∼100k B T/e) sehingga mematahkan teori klasik fenomena elektrokimia [ 29 ].
GAMBAR 3
Buka di penampil gambar
Kekuatan Gambar
(A) Lintasan partikel eksperimen yang diperoleh dengan analisis gambar diproses dengan MATLAB; (B) lintasan partikel terhitung yang diplot dalam COMSOL dikoreksi dengan faktor koreksi
. Batang kuning mewakili elektroda emas. Kedua lintasan partikel ini diperoleh dengan menggunakan parameter berikut: V = 6 V pp , f = 1 kHz,
Metode eksperimental dan numerik untuk menentukan kecepatan selip memiliki tantangan tertentu. Kecepatan selip, yang diukur secara horizontal di sepanjang elektroda dari tepi ke tengah, dapat sulit dilacak secara akurat menggunakan plugin ImageJ. Hal ini terutama disebabkan oleh kecenderungan mikropartikel fluoresensi terperangkap pada elektroda, yang berpotensi memenuhi gambar di wilayah ini dan mempersulit analisis. Akibatnya, pengukuran eksperimental kecepatan elektroosmotik yang disajikan pada Gambar 4C,D diperoleh secara manual dengan melacak mikropartikel fluoresensi dan menghitung kecepatannya berdasarkan waktu yang berlalu antara gambar (1/60 d, untuk mengoptimalkan kontras dan pelacakan) dan ukuran piksel.

GAMBAR 4
Buka di penampil gambar
Kekuatan Gambar
(A) Gambar pusaran pada tegangan tetap (6 V pp ) dan frekuensi tetap (1 kHz); (B) Gambar pusaran pada tegangan tetap (6 V pp ) dan konduktivitas tetap (3 mS/m); (C) Plot kecepatan sebagai fungsi konduktivitas untuk tiga tegangan; (D) Plot kecepatan sebagai fungsi frekuensi untuk tiga konduktivitas. Batang galat pada gambar menunjukkan ketidakpastian yang terkait dengan variabilitas dalam memilih partikel fluoresensi secara manual dalam perangkat lunak ImageJ di 10 pengukuran (ketidakpastian tipe B); (E) Gambar ruang mikrofluida sebelum (atas) dan setelah (bawah) penerapan medan listrik selama 30 detik ( V = 6 V pp , f = 1 kHz,
). Lingkaran abu-abu membatasi zona penipisan dan persegi panjang abu-abu menguraikan elektroda.
Lebih jauh, meskipun simulasi menawarkan wawasan berharga, model numerik yang dijelaskan dalam Bagian 3.6, yang didasarkan pada simulasi COMSOL, memiliki peluang untuk penyempurnaan. Misalnya, partikel mikro yang mengalami ACEO cenderung menempel pada tepi elektroda. Partikel tersebut mungkin tidak dapat didorong secara efektif ke arah tengah karena kondisi batas “lengket” yang diterapkan pada elektroda pada COMSOL. Lebih jauh, model tersebut saat ini tidak memperhitungkan interaksi partikel-partikel, sehingga menghadirkan peluang yang menjanjikan untuk perbaikan di masa mendatang.
4.3 Studi Eksperimen tentang Pengaruh Konduktivitas, Frekuensi, dan Tegangan
Perangkat yang dijelaskan sebelumnya adalah alat yang berharga untuk mengamati vortisitas, seperti yang ditunjukkan pada Gambar 4A, B, E. Pengamatan waktu nyata dari pembentukan vortisitas diperoleh, dan memungkinkan korelasi dengan parameter input. Setelah menerapkan medan listrik, gambar ruang menunjukkan partikel mikro yang ditangkap pada elektroda, muncul sebagai bintik-bintik fluoresensi. Daerah paling terang (Gambar 4A, B, E ), tempat manik-manik mikro fluoresensi paling terkonsentrasi, terletak di tengah elektroda, yang menunjukkan bahwa ACEO mendominasi DEP. Ketika gaya elektroosmotik melemah, maka dua bintik fluoresensi muncul [ 11 , 31 ] seperti yang diilustrasikan pada frekuensi 2 kHz (Gambar 4B ) dan konduktivitas 0,5 atau 1 mS/m (Gambar 4A ) dan dijelaskan pada Gambar 2D .
Untuk memudahkan perbandingan antara parameter masukan, kecepatan partikel (kecepatan slip di dekat permukaan elektroda) diukur dan diplot pada Gambar 4C,D .
Saat tegangan meningkat, medan listrik bertambah kuat, menghasilkan kecepatan elektroosmotik yang lebih tinggi (Persamaan 4 ).
Studi pada konduktivitas yang bervariasi (lihat Gambar 4A ) menunjukkan bahwa vortisitas yang terdefinisi dengan baik terjadi dalam rentang konduktivitas 1–5 mS/m untuk frekuensi 1 kHz. Konduktivitas di luar rentang ini menghasilkan vortisitas yang kurang terdefinisi atau tidak ada sama sekali. Seperti yang diuraikan dalam Bagian 2.2, pada konduktivitas yang tinggi, pengurangan potensi zeta menyebabkan penurunan kecepatan elektroosmotik. Sebaliknya, konduktivitas yang lebih rendah akan menghasilkan kecepatan elektroosmotik yang lebih tinggi, sehingga meningkatkan hambatan fluida dan memungkinkan pengumpulan lebih banyak mikropartikel pada elektroda. Namun, ketika konduktivitas terlalu rendah, penurunan kecepatan elektroosmotik diamati. Hal ini dapat dikaitkan dengan terbatasnya ketersediaan ion, yang membatasi pembangkitan fluks elektroosmotik yang signifikan. Medan listrik yang diberikan tidak dapat memobilisasi sejumlah ion yang cukup untuk menginduksi pergerakan fluida yang efektif, yang menyebabkan pengurangan kecepatan elektroosmotik. Tenaga pendorong utama aliran elektroosmotik—hasil dari medan listrik dan kerapatan muatan ionik—tidak cukup untuk mengatasi viskositas cairan [ 27 ].
Mengenai frekuensi, pusaran yang terdefinisi dengan baik diamati dalam rentang frekuensi 500–1 kHz, seperti yang dibahas dalam Bagian 2.2.
Gambar 4D mengilustrasikan bahwa frekuensi optimal untuk mencapai kecepatan yang lebih tinggi bergantung pada konduktivitas dan meningkat dengannya. Memang, frekuensi optimal untuk aliran ACEO terkait erat dengan konduktivitas medium. Dalam media dengan konduktivitas rendah, ion membutuhkan waktu lebih lama untuk bermigrasi dan membentuk EDL karena ketersediaannya yang terbatas. Akibatnya, frekuensi AC yang lebih rendah diperlukan untuk memberikan waktu yang cukup bagi EDL untuk mengisi daya dan menggerakkan aliran ACEO yang efektif. Sebaliknya, dalam media dengan konduktivitas tinggi, EDL terbentuk dengan cepat karena ion berlimpah dan bermigrasi lebih cepat. Frekuensi yang lebih tinggi diperlukan dalam kasus ini untuk memastikan transfer energi yang efisien sambil menghindari efek parasit seperti elektrolisis atau difusi yang berlebihan. Keseimbangan ini memastikan kinerja ACEO yang optimal di berbagai tingkat konduktivitas. Sebaliknya, seperti yang ditunjukkan pada Gambar 4C , konduktivitas medium yang diperlukan untuk mencapai kecepatan tertinggi (5 mS/m dalam penelitian ini) tetap konstan di berbagai tegangan yang diberikan. Sebuah penelitian pada berbagai frekuensi yang dilakukan oleh Green et al. [ 33 ] pada elektroda koplanar menunjukkan tren serupa dalam perilaku kecepatan.
Selain itu, alat ini memfasilitasi diferensiasi antara pusaran yang disebabkan oleh elektroosmosis, yang dicirikan oleh arah putaran yang diketahui (yaitu, dari tepi elektroda ke pusat) dan bentuk, dan pusaran yang dihasilkan dari ETE atau fase transisi antara fenomena ini, termasuk contoh pusaran ganda [ 19 , 30 , 34 ].
Terakhir, hal ini memungkinkan pengamatan zona penipisan (Gambar 4E ), tempat partikel terbawa oleh pusaran. Kemampuan ini memungkinkan untuk mempelajari bagaimana berbagai parameter—seperti konduktivitas, voltase, frekuensi, ukuran elektroda, dan tinggi ruang—mempengaruhi volume penangkapan. Dalam hitungan detik, partikel yang ada dalam larutan ditangkap pada permukaan elektroda (lihat dalam video Informasi Pendukung ), fitur yang sangat berguna untuk meningkatkan penangkapan pada biosensor berbasis permukaan dari objek biologis seperti sel atau bakteri.
4.4 Studi Numerik Pengaruh Geometri Ruang
Metode pelacakan partikel ini memungkinkan kami untuk menyelidiki bagaimana geometri ruang memengaruhi penangkapan elemen target. Kami memeriksa jumlah partikel yang terperangkap pada elektroda sebagai fungsi jarak antara keduanya dan ketinggian ruang.
Dalam studi pengaruh geometri, seperti yang ditunjukkan pada Gambar 5 , parameter input ditetapkan pada tegangan 6 V pp , konduktivitas medium 1 mS/m, dan faktor koreksi 0,02 yang diterapkan dalam simulasi.
GAMBAR 5
Buka di penampil gambar
Kekuatan Gambar
Jumlah partikel mikro berdiameter 1 µm yang terperangkap pada elektroda setelah 60 detik ditunjukkan dengan warna biru, sedangkan proporsi partikel yang terperangkap pada elektroda ditunjukkan dengan warna merah untuk (A) celah antar elektroda yang berbeda (tinggi = 160 µm) dan (B) tinggi ruang (celah antar elektroda = 100 µm). Parameter listrik ditetapkan pada f = 1 kHz dan V = 6 V pp , dan konduktivitas medium adalah 1 mS/m. Sisipan tidak berskala.
Jumlah dan proporsi mikropartikel yang terperangkap setelah 60 detik dihitung untuk berbagai geometri, seperti yang ditunjukkan pada Gambar 5. Lebar elektroda dijaga konstan pada 100 µm. Parameter geometri secara signifikan memengaruhi proporsi mikropartikel yang terperangkap pada elektroda. Ketika memvariasikan tinggi ruang (dari 50 hingga 420 µm), celah antar-elektroda ditetapkan pada 200 µm. Sebaliknya, ketika memvariasikan celah antar-elektroda (dari 30 hingga 400 µm), tinggi ruang ditetapkan pada 160 µm. Mikropartikel 1 µm dilepaskan pada t = 0 detik dengan jarak dalam dimensi melintang x dan y sebesar 15 µm dalam medium 1 mS/m.
Hasil penelitian menunjukkan bahwa celah antar-elektroda yang lebih kecil menghasilkan proporsi partikel mikro yang terperangkap lebih rendah, karena volume tangkapan yang disebabkan oleh pusaran saling tumpang tindih. Sebaliknya, jika celah antar-elektroda terlalu besar, volume tangkapan di atas setiap elektroda gagal menutupi seluruh ruang, sehingga menghasilkan proporsi partikel mikro yang terperangkap lebih rendah. Demikian pula, jika tinggi ruang terlalu besar, volume tangkapan tidak dapat mencapai seluruh ruang, yang lagi-lagi menghasilkan proporsi partikel mikro yang terperangkap lebih rendah. Tinggi ruang yang kecil menyiratkan celah yang lebih kecil di antara elektroda, yang menghasilkan medan listrik yang lebih kuat dan, dengan demikian, kecepatan elektroosmotik yang lebih cepat. Namun, pusaran menjadi terkompresi dan tidak dapat membawa sebagian besar partikel.
Karena kepadatan partikel konstan dalam simulasi, jumlah partikel meningkat seiring dengan ukuran ruang. Proporsi partikel yang terperangkap (plot merah) menunjukkan bahwa untuk elektroda sisir 100 µm yang menghadap elektroda emas datar, jarak optimal untuk menjebak proporsi partikel maksimum harus antara 90 dan 160 µm. Untuk ketinggian 160 µm, elektroda sisir harus memiliki jarak elektroda antara 100 dan 240 µm untuk mencapai hasil terbaik.
5 Kesimpulan
Alat eksperimen baru untuk memvisualisasikan secara langsung efek elektrokinetik AC yang dihasilkan oleh elektroda atas-bawah disajikan. Untuk mengidentifikasi tren dan meningkatkan pemahaman fenomena ACEO dengan ketergantungannya pada parameter seperti konduktivitas medium, frekuensi yang diterapkan, dan voltase, kecepatan slip diukur secara eksperimen dalam berbagai kondisi. Efek ACEO dan DEP pada manik-manik lateks dijelaskan secara teoritis dan divalidasi secara konsisten melalui eksperimen. Selain itu, simulasi numerik, yang disesuaikan dengan faktor koreksi yang ditentukan secara eksperimen antara 0,016 dan 0,025, dilakukan menggunakan COMSOL untuk mempelajari pengaruh geometri elektroda. Studi numerik ini menunjukkan hasil yang mirip dengan eksperimen, baik secara kualitatif (melalui bentuk pusaran dan zona penipisan) maupun kuantitatif (melalui peta kecepatan).
Berdasarkan kondisi penelitian kami—mikrob lateks 1 µm dalam ruang mikrofluida di antara dua elektroda atas-bawah yang berjarak 160 µm—parameter optimal untuk mengumpulkan partikel mikro terbanyak pada permukaan elektroda adalah konduktivitas sedang antara 1 dan 5 mS/m dan frekuensi antara 500 dan 1 kHz. Parameter ini konsisten dengan yang dilaporkan dalam literatur untuk fenomena ACEO yang mendominasi. Model numerik 2D ini dan pendekatan yang diuraikan untuk memilih parameter input guna memusatkan target pada permukaan dapat dengan mudah disesuaikan dengan berbagai konfigurasi elektroda dan partikel yang disesuaikan dengan aplikasi yang diinginkan.
Pekerjaan masa depan di bidang biosensor berbasis permukaan dapat dibangun berdasarkan studi ini untuk meningkatkan transportasi massa untuk aplikasi biosensor dengan menjebak mikrometer target biologis pada area sensor dalam beberapa detik.

Tinggalkan Balasan